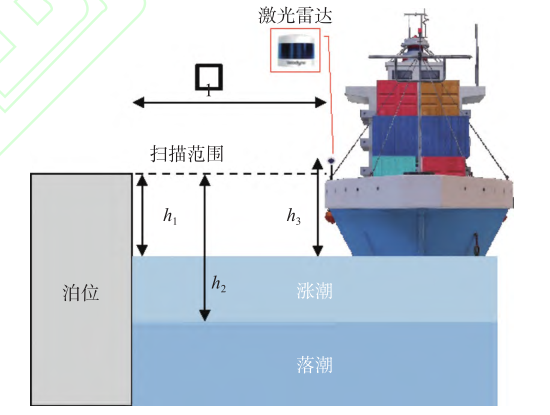
基于单目视觉的水面目标检测与跟踪技术,利用深度学习技术对内河环境下的各类船舶、航标等水面目标进行高精度检测。通过改进的检测算法(如YOLO系列改进版),实现复杂光照、遮挡条件下的鲁棒识别。结合视觉跟踪算法,对动态目标进行持续跟踪,为后续的避碰决策提供可靠的感知输入。同时,我们还研究激光雷达/视觉/AIS多源融合感知技术,将异构传感器数据进行时空同步与融合,将激光雷达的精确距离信息、摄像头的丰富纹理信息以及AIS的身份信息有机结合,构建船舶周围环境的全景态势感知模型,显著提升在恶劣天气(如雾霾、雨雪)下的环境感知能力。针对内河通航复杂场景,课题组在单目视觉与多源融合感知基础上,进一步突破激光雷达点云-视觉图像联合感知与船岸协同位姿精准测量关键技术。面向三峡升船机、船闸等受限水域,提出自适应体素滤波、特征点定位与自适应姿态解算方法,实现船舶纵向位置、航速、偏航角实时高精度感知,有效解决点云遮挡、烟气干扰等难题。针对船舶靠离泊作业,构建多坐标系统一转换与时间配准框架,优化RANSAC岸线提取算法,融合激光雷达与惯性导航数据,实现泊位特征点精准定位。依托多源异构数据时空同步与特征级融合,建立全景环境态势模型,大幅提升雨雾、夜间等恶劣条件下目标识别、距离测量与轨迹跟踪稳定性。相关成果已在实船与通航建筑物现场验证,为智能船舶自主航行、靠离泊自动化及升船机安全高效运行提供核心感知支撑。
研究方向
深入探索船艇智能航行的核心技术领域。
智能感知(Intelligent Perception)
相关论著
- 兰加芬, 郑茂, 初秀民, 柳晨光, 吴勇. 利用激光雷达进行船舶位姿感知. 武汉大学学报(信息科学版), 2025, 50(4): 782-791. https://doi.org/10.13203/j.whugis20220792
- 贺治卜, 闫文洲, 柳晨光*, 初秀民, 刘新宇. 融合激光雷达和惯性导航的船舶靠离泊高精度定位方法. 中国舰船研究, 2025, 20(05): 280-288. https://doi.org/10.19693/j.issn.1673-3185.03858
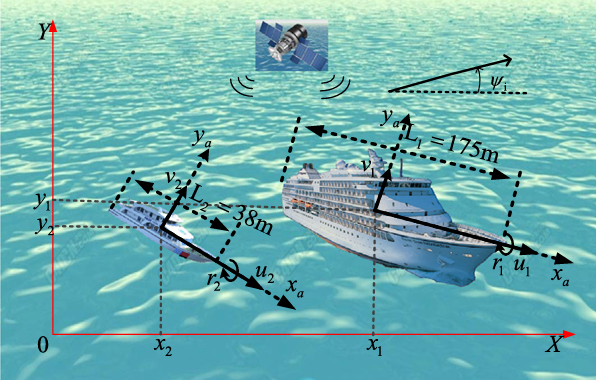
- W. Wu, C. Liu*, X. Chu, W. Mao. Multiple sensor fault-tolerant predictive control for autonomous surface vehicle formation. ISA Transactions, 2025. https://doi.org/10.1016/j.isatra.2025.07.053
决策与规划(Decision Making & Planning)
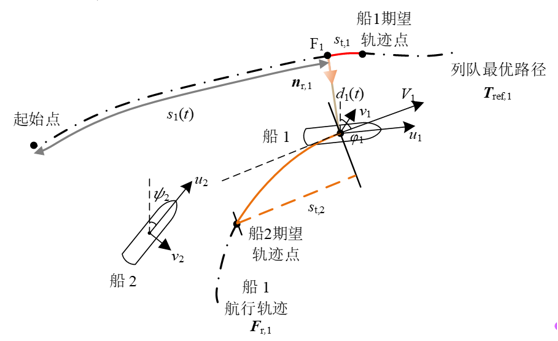
在智能感知与决策规划方向,研究小组面向复杂内河与近海通航场景,持续突破多源异构感知融合与自主航行核心技术。基于单目视觉与深度学习,实现内河船舶、航标等目标在复杂光照、遮挡条件下的高精度检测与稳定跟踪;构建激光雷达/视觉/AIS多源融合感知体系,完成时空同步与特征级融合,显著提升雾霾、雨雪等恶劣天气下全景态势感知能力。针对密集水域群目标避碰难题,融合DBSCAN聚类与速度障碍法,提出CVO集群避碰方法,将渔船群等效为整体目标,结合DCPA、TCPA实现风险评估与安全避碰,大幅提升密集通航安全性。面向感知不确定性下的可靠航行,提出一致性感知局部路径规划框架CKVPF,融合卡尔曼滤波与历史一致性约束,在实船试验中可稳定应对对遇、追越、交叉及多船会遇场景。同时研发分阶段流形约束RRT*靠泊规划方法,实现内河船舶顶首靠泊高精度轨迹与姿态规划,实船与模型试验操控平稳。相关成果已在实船与通航现场验证,为智能船舶自主航行、密集水域避碰及自动化靠离泊提供关键技术支撑。
相关论著
- Z. He, C. Liu*, P. Zhang, H. Chen, R. Yan and X. Chu. Consistency-Aware Local Path Planning for Maritime Autonomous Surface Ships Under Perception Uncertainty: A Field-Validated Framework. IEEE Transactions on Intelligent Transportation Systems, 2026. https://doi.org/10.1109/TITS.2026.3677261
- N. Li, C. Liu*, Z. He, K. Li, J. Liu and X. Chu. Collision avoidance for group targets based on clustering velocity obstacle algorithm. 2025 IEEE 5th International Conference on Computer Communication and Artificial Intelligence (CCAI), Haikou, China, 2025, pp. 748-754. https://doi.org/10.1109/CCAI65422.2025.11189631
- W. Yan, C. Liu*, Z. He, X. Chu, D. Huang. Phased manifold-based RRT*: An optimized motion planning approach for autonomous bow-in berthing of inland vessels. Journal of Ocean Engineering and Science, 2025. https://doi.org/10.1016/j.joes.2025.12.013
定位与控制(Localization & Control)
在高精度组合导航与船舶智能运动控制领域,研究小组持续突破多源融合定位与鲁棒控制关键技术。面向 GNSS 信号失效场景,深度融合 GNSS、惯性导航、视觉 SLAM 与激光 SLAM,构建多源异构信息时空同步机制,依托激光雷达点云与视觉纹理互补感知,实现桥梁、港口等受限区域厘米级船舶定位与位姿解算,为复杂水域自主航行提供可靠基准。基于 MMG 高精度船舶运动建模,系统开展模型预测控制、滑模控制与自适应容错控制研究。针对内河与近海强干扰环境,提出抗扰轨迹跟踪算法,有效抑制风、浪、流扰动,显著提升控制精度与航行稳定性。面向多船编队与传感器故障场景,研发分布式容错预测控制框架,融合事件触发与迟滞量化机制,在保障编队队形与跟踪精度的同时,降低通信与执行器损耗。相关成果在实船与模型试验中得到验证,全面支撑智能船舶高精度自主定位、轨迹跟踪与编队协同控制,为内河智能航运与港口自动化作业提供核心技术支撑。
相关论著
- G. Zhang, Q. Cao, J. Li, C. Liu, W. Zhang. Robust composite event-triggered control for heterogeneous ships: Application to an auto-detecting operation. ISA Transactions, 2025, 16841-51. https://doi.org/10.1016/j.isatra.2025.11.035
- H. Wang, C. Liu*, W. Wu, W. Yan, B. Liu and X. Chu. Multistage vessel berthing position and attitude planning based on improved RRT* algorithm. 2025 IEEE 5th International Conference on Computer Communication and Artificial Intelligence (CCAI), Haikou, China, 2025, pp. 690-696. https://doi.org/10.1109/CCAI65422.2025.11189509
- W. Wu, C. Liu*, X. Chu, W. Mao. Multiple sensor fault-tolerant predictive control for autonomous surface vehicle formation. ISA Transactions, 2025. https://doi.org/10.1016/j.isatra.2025.07.053
仿真与试验
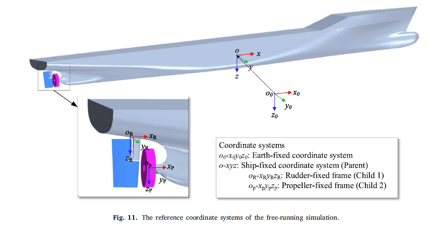
研究小组在数字孪生与虚实交互方向取得系统性进展,构建了覆盖感知 — 仿真 — 决策 — 控制的全流程虚实融合验证体系。基于激光雷达点云与多源异构数据,建立船舶与通航环境高精度数字孪生模型,实现船舶位姿、运动状态与周围态势的实时映射。研发虚实交互闭环验证平台,支持仿真环境与实船数据双向同步、在线迭代,完成三峡升船机、密集水域、多船会遇等典型场景的物理场景与数字空间精准映射。通过虚实联动开展群目标避碰、感知不确定下路径规划、靠泊轨迹优化等算法验证,显著提升方案可靠性与落地效率,为智能船舶自主航行系统提供全流程、高置信度的虚实融合测试与工程化支撑。
课题组自主搭建云帆系列实船试验验证平台,包含四艘功能互补的智能航行测试船艇,构建覆盖多尺度、多构型、多场景的水域试验验证体系,形成 "算法设计 — 仿真测试 — 实船验证" 完整闭环研发流程。云帆一号为 180cm 大尺度实验船,搭载 RTK 定位与高精度姿态传感器,采用双计算核心与混合通信架构,支撑全工况基础算法与轨迹跟踪验证;云帆二号为欠驱动双桨双舵缩比船,集成差分 GNSS 与电子罗经,依托 5G 通信与 FOC 驱动系统,服务靠泊轨迹跟踪与闭环控制研究;云帆三号为双桨无舵推进船,适配欠驱动控制与轨迹预测验证;云帆四号配备激光雷达与多传感器融合系统,算力强劲、扩展性强,支撑智能避障、多船协同与环境感知实测。平台具备厘米级定位、高精度姿态采集、稳定动力控制与高速通信能力,已在真实水域完成大量航行试验,为感知、决策、控制一体化算法提供高置信度实船验证支撑。
实验装备平台
云帆一号(Cloudsailing Ⅰ)—— 大尺度智能航行实验船

云帆一号为一艘大尺度智能航行实验船,船长 180cm、型宽 27.6cm,排水体积 33898cm³,是船舶智能航行基础研究与全工况算法验证的核心大尺度实验载体。
该船搭载2cm 级 RTK 差分 GNSS与北微传感 BW-AH200 姿态传感器,可精准采集船速、航向、艏向及横滚、俯仰数据;配备 PWM 控制的驱动电机与 ±45° 转角舵机,搭配高精度角度传感器、编码器实现动力与转向的闭环反馈;以 12 代 i5 工控机 + 树莓派 4B 为双计算核心,结合 4G 无线 + 有线的混合通信架构,支撑复杂智能航行算法的实时运算、指令下发与船间数据交互,为大尺度船舶轨迹跟踪、运动控制等研究提供高精准、高稳定的实船实验支撑。
云帆二号(Cloudsailing Ⅱ)—— 欠驱动双桨双舵智能航行实验船

云帆二号为一艘欠驱动双桨双舵缩比模型船,船长 0.965m、船宽 0.300m,整船质量 11.00kg,是船舶靠泊轨迹跟踪控制等方向的核心实验载体。
该船搭建状态感知 - 交互控制 - 终端显示一体化实验平台,搭载差分 GNSS、SCM345 电子罗经、高精度舵角反馈传感器等设备,实现船舶位置、艏向、姿态等数据的高精度采集;依托工控机 + 树莓派的双计算核心,结合 5G 通信与 FOC 直流无刷电机驱动系统,完成算法实现、指令转发与动力控制,为智能航行闭环控制研究提供稳定、精准的实船实验支撑。
云帆三号(Cloudsailing Ⅲ)—— 双桨无舵推进智能航行实验船

云帆三号是一艘双桨无舵推进缩比模型船,船长 93.0cm、质量 15.5kg,专为船舶轨迹跟踪、欠驱动控制等研究方向提供实船验证平台。
它搭载差分 GNSS + 姿态传感器,可输出厘米级定位与高精度艏向、姿态数据;采用双桨无舵推进结构,配合 PWM 控制驱动电机与舵机系统,实现灵活转向与动力输出;以 12 代 i5 工控机 + 嵌入式设备为双计算核心,支撑智能航行算法的实时决策与数据交互,是欠驱动船舶控制、轨迹预测等研究的关键实验载体。
云帆四号(Cloudsailing Ⅳ)—— 通用智能航行测试船

云帆四号是课题组面向船舶智能航行研究装备的通用智能航行测试船,核心支撑轨迹预测、智能避障、多船协同等方向的算法验证与数据采集。
云帆四号搭载速腾聚创 RS-bpearl 激光雷达与双天线 RTK 定位系统,可实现厘米级定位与三维环境感知;以天虹 R7-6800H 工控机为算力核心,搭配树莓派 Pi 5 拓展控制能力,具备高稳定性与可扩展性,能快速适配不同算法与传感器,是连接实验室仿真与真实水域测试的关键装备。