动态避碰A*算法
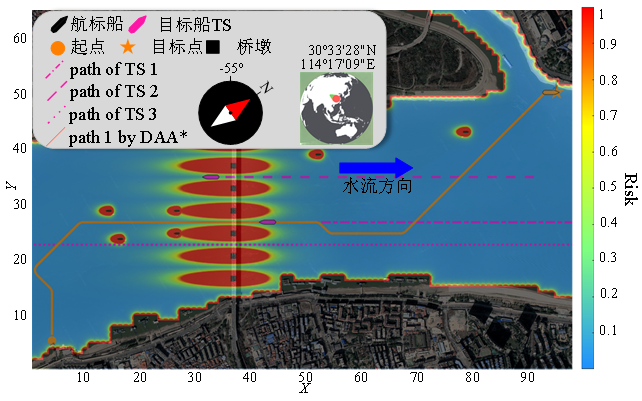
DAA*算法因为考虑了船舶运动约束与障碍物领域,因此在保证了安全性的同时,生成了转向较少的路径,而且在算法计算时间、路径距离、路径风险等方面都优于A* combined ship domain和传统A*算法,相较于re-plan的避碰方法降低了计算量,保证了全局最优解。
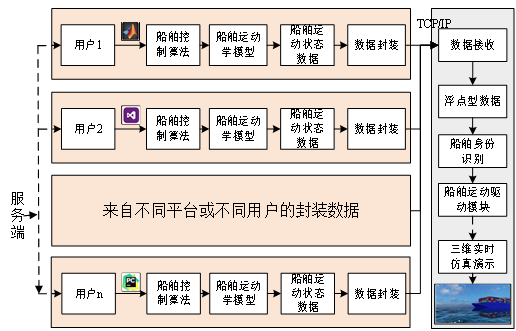
以严新平院士提出的全新一代航运系统为架构,武汉理工大学云帆-船艇智能航行研究小组(Intelligent Marine Navigation Research Group, IMNRG)围绕船艇智能航行的关键技术开展研究,包括但不限于:目标探测与跟踪、态势感知与风险评估、航迹规划与避碰控制、多源数据融合定位、数字孪生与仿真平台、以及实船试验验证等方向。
小组论文《Uncertainty-aware collision avoidance for autonomous maritime navigation using MDN-HDVPF: method and real-world experiments》被交通领域期刊《Transportation Research Part C》录用。
小组论文《Rules-compliant ship collision avoidance based on progressive hybrid guidance proximal policy optimization》被海洋工程领域期刊《Ocean Engineering》录用。
祝贺由李科橙、周华、刘骥腾、李纯冰、吴光骏同学参与,柳晨光、李梦霞老师指导的作品《云帆 ・ 全链 —— 面向港口高效作业的泊位 - 拖轮船港一体化智能调度系统》,荣获 "船视宝" 杯第二十一届全国大学生交通运输科技大赛三等奖 。
DAA*算法因为考虑了船舶运动约束与障碍物领域,因此在保证了安全性的同时,生成了转向较少的路径,而且在算法计算时间、路径距离、路径风险等方面都优于A* combined ship domain和传统A*算法,相较于re-plan的避碰方法降低了计算量,保证了全局最优解。
MPAPF可以降低局部最优的概率,而且可以符合船舶动力学约束,对比DAA*、 RRT-COLREGS、APF等算法进行了对照实验。MPAPF可以生成更加符合船舶动力学约束的路径,预测步长的增加会更提早安全避碰。
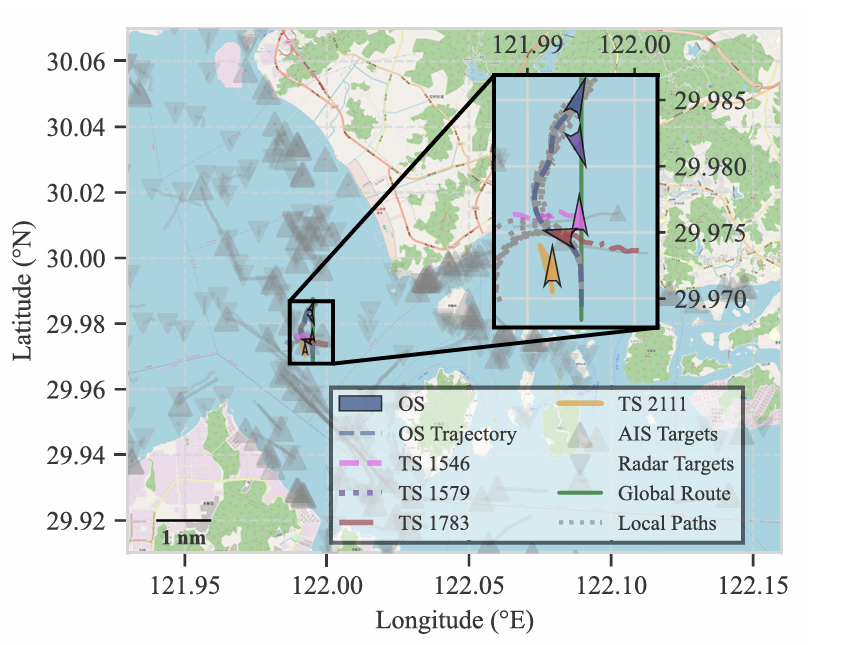
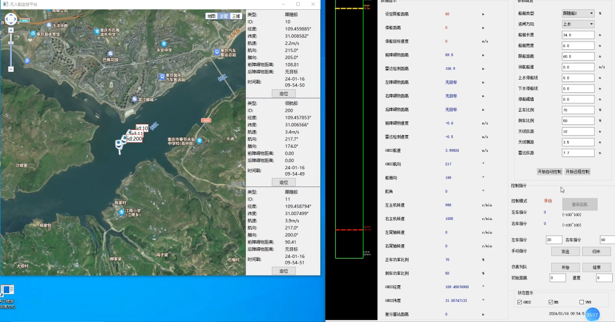
方法提取了电子海图中特定的图幅信息来判断当前区域是否可以航行,并提取障碍物的多边形来辅助静态避碰决策,基于目标船与本船的相对运动信息,设计了动态船舶领域,以保证避碰的安全性,建立了虚拟力场模型来描述船舶航行风险,基于LOS法对该路径进行跟踪指导完成局部避碰。
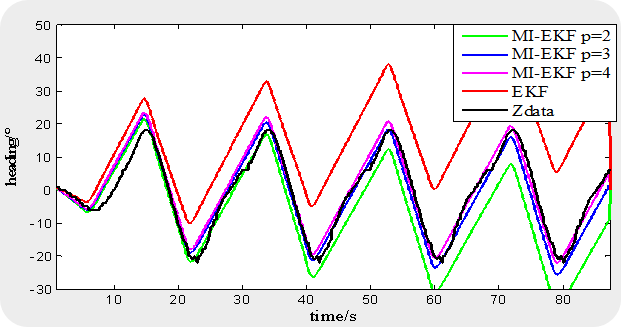
鉴于可使用高精度惯导设备获取精确的首向角速度和角加速度,使用全部状态量以及待辨识参数一起构成MI-EKF辨识的增广矩阵,引入遗忘因子进行辨识改进,通过递推过程减弱历史数据的修正效果,减小产生的累积干扰,使算法具有对新量测输入变化的快速响应能力。
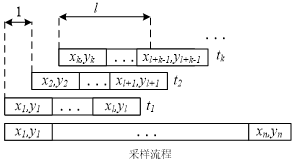
方法对在线LS-SVM递推过程中的单新息进行扩展,成为MI-LS-SVM,针对增加的正则因子Cb,使用粒子群优化算法进行调节。
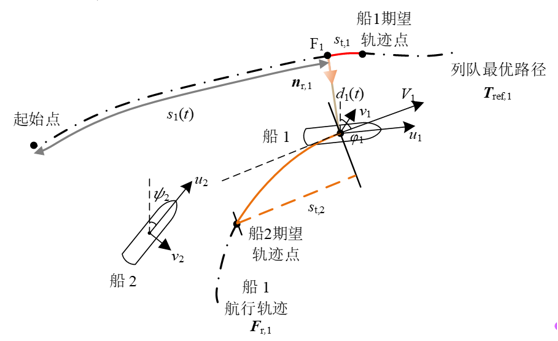
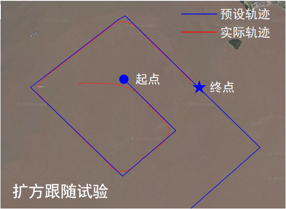
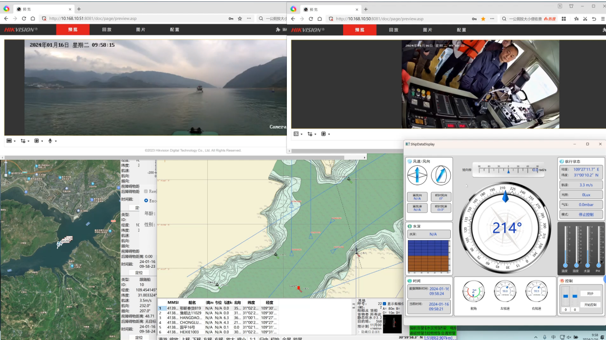
系统实现了领航船航速自动控制、跟随船距离保持自动控制、闸室自动停船控制等功能,在三峡-葛洲坝船闸水域开展了多次船舶编队协同过闸测试,距离跟踪误差为2.43 m,速度跟踪误差为0.33 m/s,提高了通航枢纽多船过闸效率。
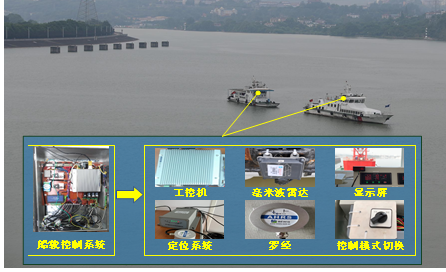
该系统具有状态感知、航速控制,通过差速实现转向,通信延迟小于1.5 s,控制指令响应速度迅速,在减少船舶配员的情况下提高了船舶航行的安全性。
系统具有编队感知、队形控制、距离保持、航速控制、岸基监控功能,实现船舶编队距离检测精度优于1.5 m,平均跟踪误差小于设定距离的15%,编队整体稳定所需时间为30 s,增强了船舶编队在内河受限水域机动性、灵活性,提高了船舶通行效率。
云帆系列智能航行模型船是连接算法仿真与实船验证的关键载体。

云帆一号(Cloudsailing Ⅰ)—— 大尺度智能航行实验船

云帆二号(Cloudsailing Ⅱ)—— 欠驱动双桨双舵智能航行实验船

云帆三号(Cloudsailing Ⅲ)—— 双桨无舵推进智能航行实验船

云帆四号(Cloudsailing Ⅳ)—— 通用智能航行测试船
合作与招生相关事宜欢迎联系:
武汉理工大学 - 教育部直属全国重点大学,首批列入国家“211工程”和“双一流”建设高校
智能交通系统研究中心 - 专注于智能交通领域技术创新
船艇智能航行研究小组 - 致力于船艇智能航行技术研究